










 Lesley Fowler
Lesley Fowler 0
0  2923
2923 662
662
Uzaktan kumandalı arabalar eğlenceli, elbette ama Kendi kendine sürüş robotik arabalar daha da eğlenceli. Bu eğitici yazıda, etrafta dolaşabilecek ve engelleri önleyebilecek dört tekerlekli bir robot yapacağız. Bu eksiksiz 4WD kitini AliExpress'ten satın aldım, ancak bu bileşenlerin çoğunu bir elektronik mağazasından kolayca satın alabilir ve kendiniz bir araya getirebilirsiniz.
Başlamadan önce tüm talimatları okumanızı öneriyorum, çünkü bu ilk seferinde kafa karıştırıcı olabilecek bazı şeyleri açık bir hale getirecek. Ayrıca, bu talimatların uzunluğu nedeniyle çok uzun, ileri bir proje gibi görünebilir, ancak aslında oldukça basittir. Korkutulmaya gerek yok - bu, bazı tatmin edici sonuçlar alabileceğiniz başlangıç seviyesindeki bir projedir, daha sonra daha fazla bilgi edinmeye başlayın. Bu robot tarzını sevmedin mi? İşte size biraz daha Arduino robotu 8 $ 125'dan daha ucuza yapabileceğiniz 8 Arduino robotu 8 $ 125'den daha ucuza yapabileceğiniz 8 Arduino robotu Arduino çok şey yapabilir, ancak tam teşekküllü robotlar yaratabileceğini biliyor muydunuz? Ayrıca oldukça ucuz! kolayca inşa edebilirsiniz.
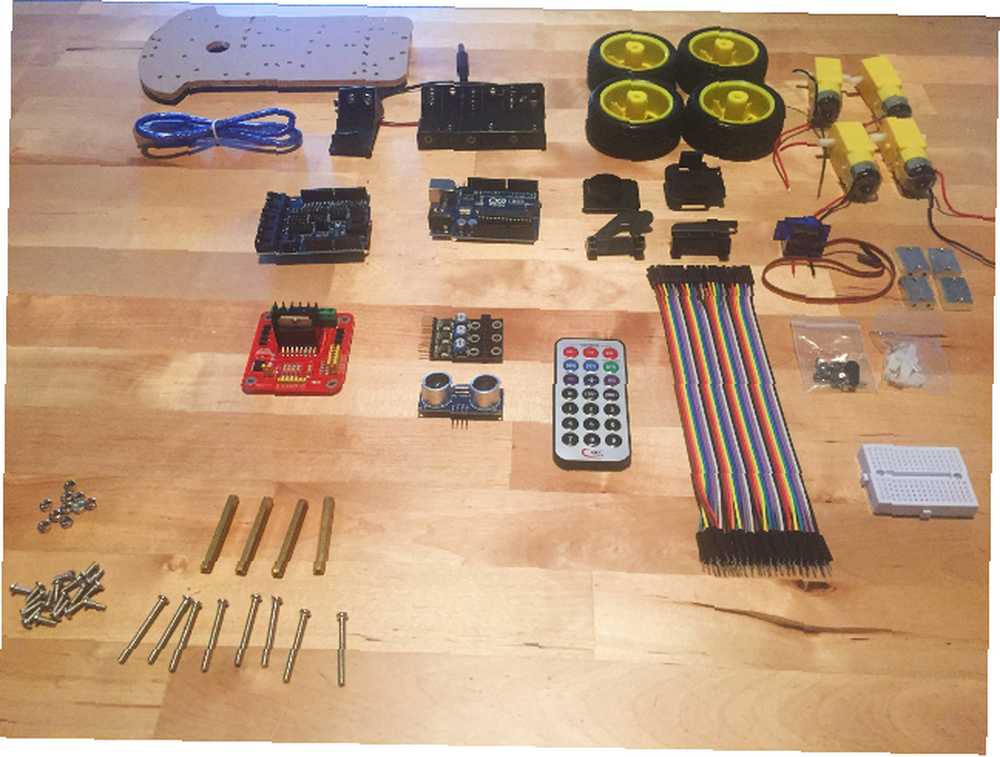
İşte elimizdekiler, her şeyi ambalajından çıkardıktan sonra:
Başlamak için, motorları ve H köprüsünü (motora güç veren kart) kasanın alt kısmına bağlayacağız. Öncelikle, iki uzun cıvata ve iki somun kullanarak dört metal braketi (dikdörtgen, delikli metal bloklar) her motora takın.
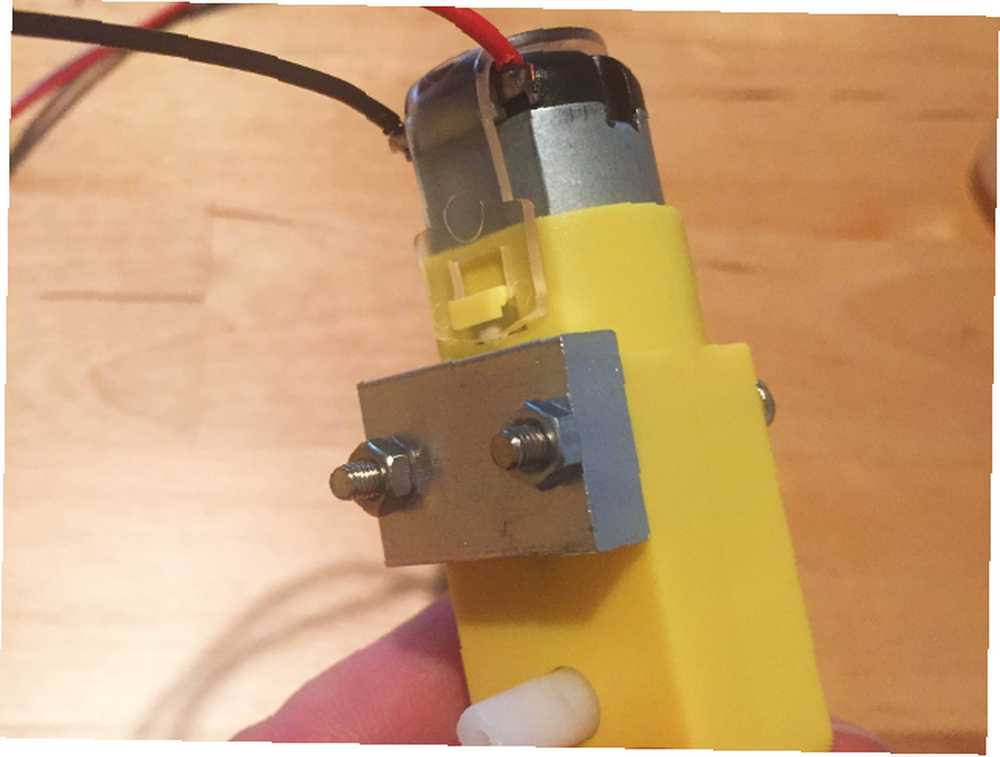
Doğru takıldıklarından emin olmanız gerekir, bu nedenle iki delikli blok tarafının aşağı bakacaklarından emin olmak için aşağıdaki görüntüyü kontrol edin. Her motordaki tellerin kasanın ortasına doğru baktığını unutmayın..
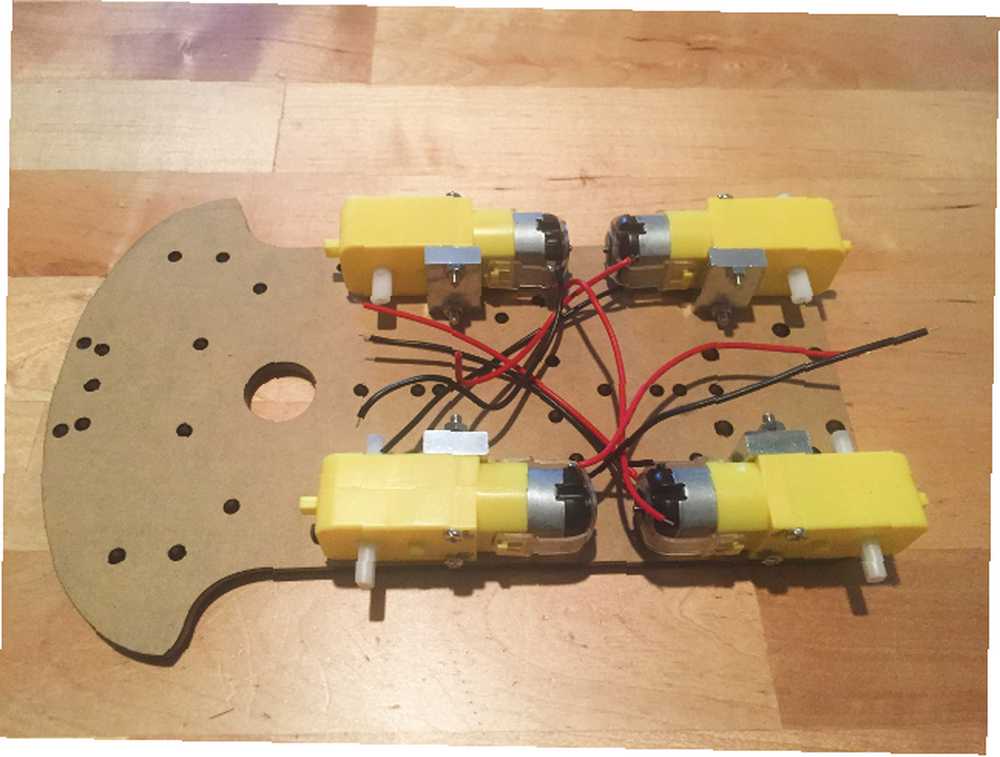
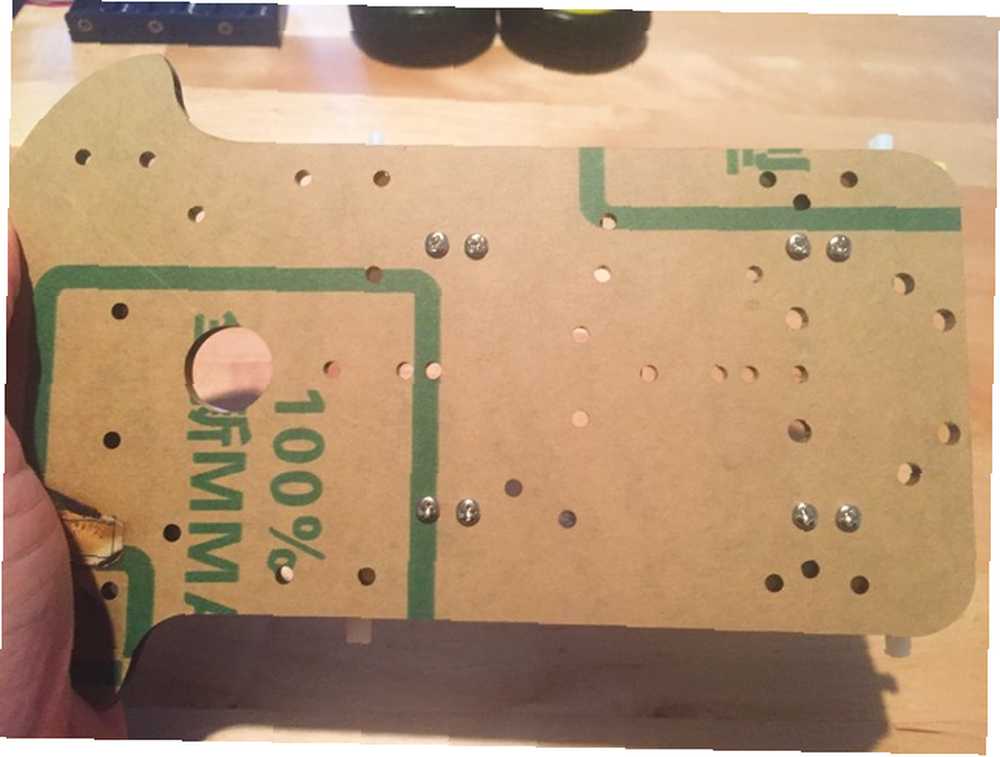
Artık her motor, her bir metal braketin altındaki iki kısa cıvata kullanılarak şasiye bağlanabilir. Şasinin alt kısmının bir görüntüsü. Böylece cıvataların nerede olması gerektiğini görebilirsiniz.
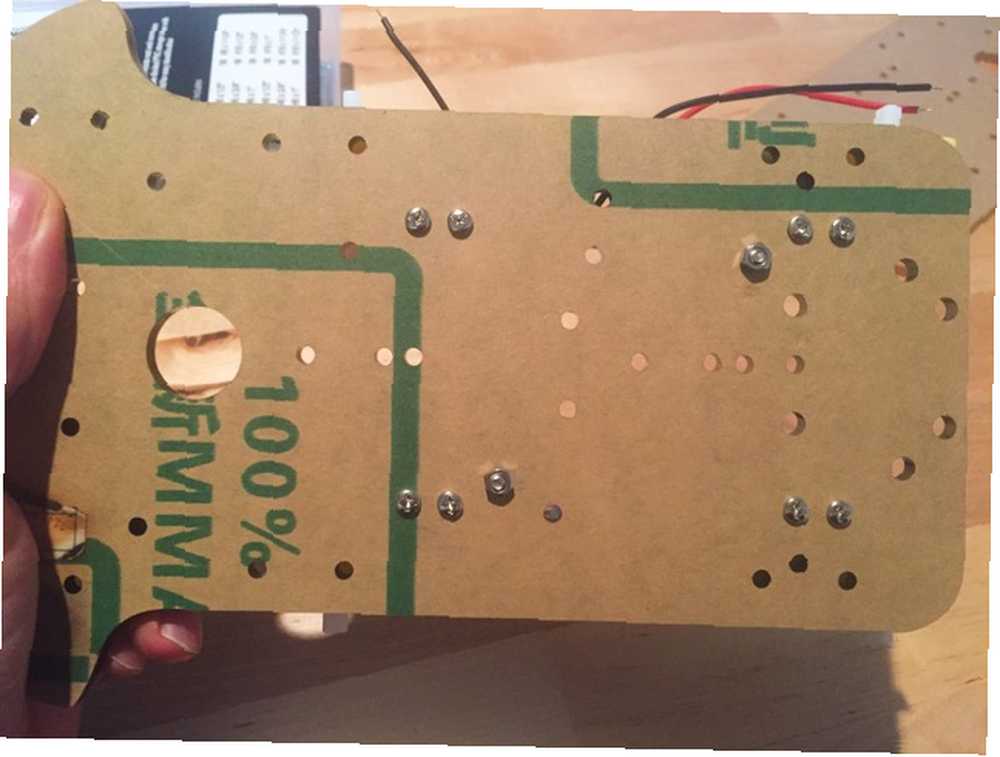
Bir sonraki adım, H köprüsünü (bu benim kitimin içindeki kırmızı kart) kasaya sabitlemek. Bunu yapmadan önce tüm tellerin H köprüsüne bağlanmasını beklemek isteyebilirsiniz, ama bu size kalmış (daha kolay buldum). Kısa bir not: Kitimde birkaç bağlantı elemanı eksikti, bu yüzden köprüyü sabitlemek için elektrik bandı kullandım. Ancak, cıvataların ve somunların nereye gittiğini burada görebilirsiniz:
H köprüsünün takılı olduğuna göre, güç kaynağını kablolamaya başlayabilirsiniz. Altı AA pil tutucusu bir DC adaptörüyle birlikte geldiğinden, ya ucunu (ki yaptığım) kesmeniz ya da atlama tellerini pillerin kendi.

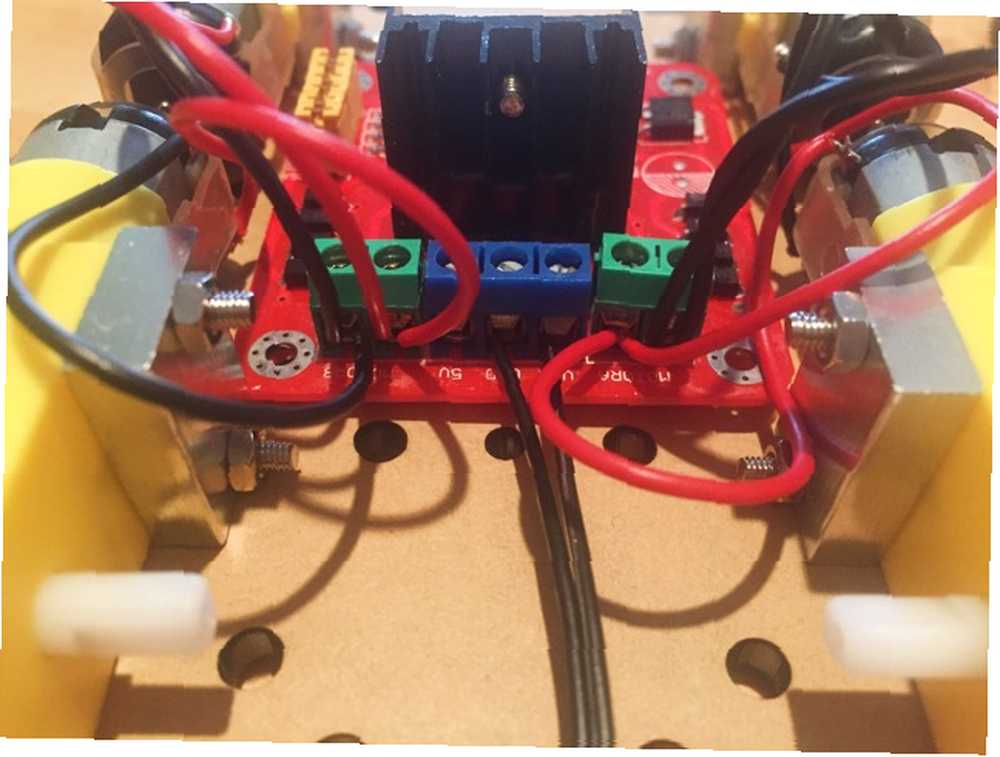
Nasıl yapmaya karar verirseniz verin, pozitif kabloyu etiketli bağlantı noktasına yönlendirirsiniz. “VMS” ve etiketli olana olan negatif tel “GND” Köprüde. Bağlantı elemanlarını sıkın ve sağlam olduklarından emin olun. Ardından, motor kablolarını bağlayacaksınız. Her iki tarafta da iki bağlantı noktası var; biri etiketli “motora” ve diğer “MOTORB.” Her ikisi de her iki taraftaki kırmızı teller en ortadaki yeşil limana girecek ve her iki siyah tel de en dıştaki alana girecektir. Bu resim daha net yapmalı:
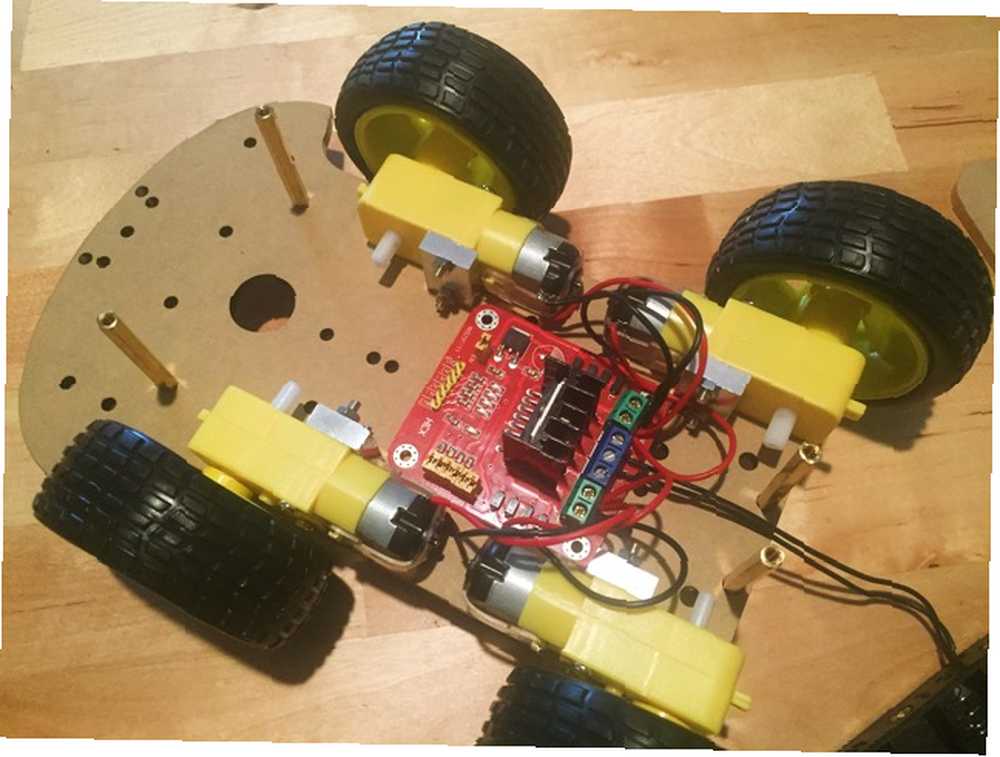
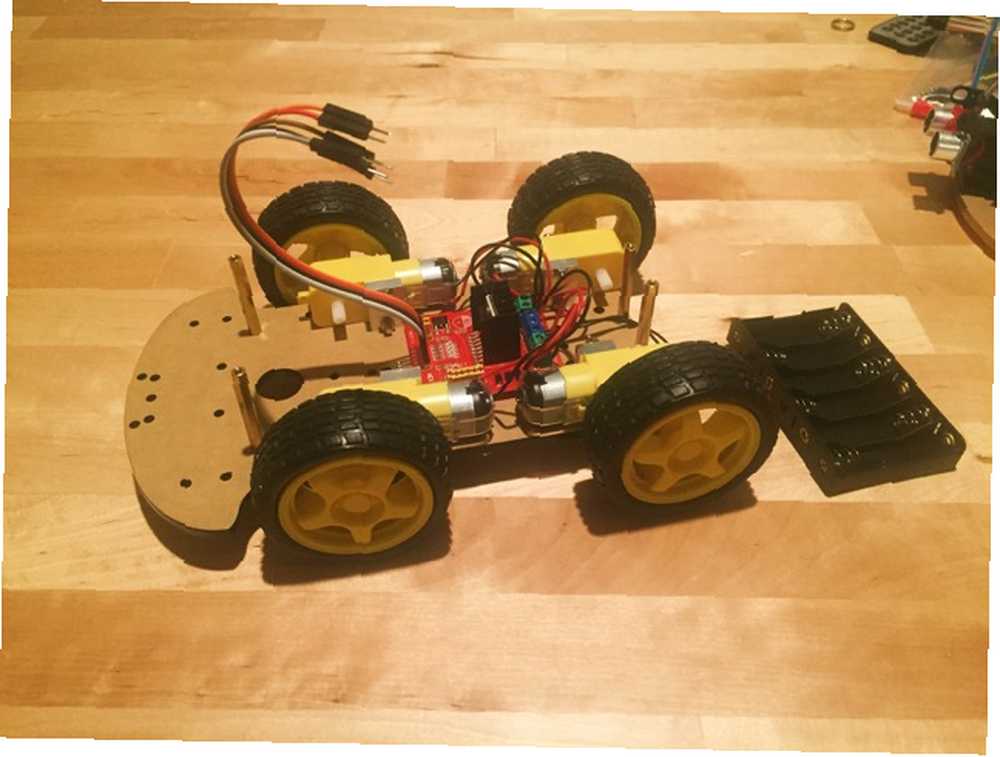
Bunun işe yaraması için gövdenin bir kısmını motor tellerinden sökmek zorunda kaldığımı öğrendim. Artık motorlara ve güç kaynağına tamamen bağlısınız, tekerlekleri motor tahrik millerinin üzerine kaydırın ve dört bakır mili aşağıdaki resimde gösterilen yerlere takın (her bakır milin bir küçük civataya ihtiyacı vardır). Bu robot şekil almaya başlıyor!
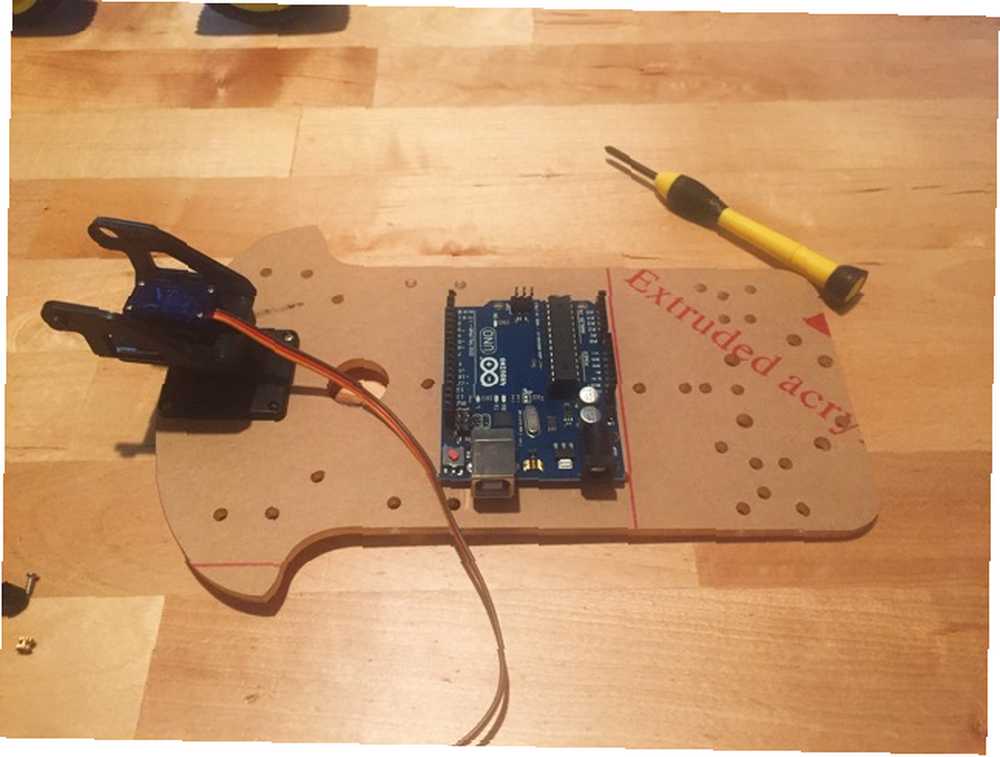
Şimdi şasinin bu kısmını bir kenara koyun ve üzerine oturan diğerini yakalayın. Bir sonraki adım Arduino'yu tekrar takmak, elektrik bandı kullanmak zorunda kaldım ama sizinkini biraz cıvata ve somunla daha iyi sabitleyebilmelisiniz..
Bir sonraki adım, mikro servo, siyah çapraz parça, servo tutucu (üç siyah plastik parçadan oluşan) ve bazı küçük vidalar gerektirir. Siyah çapraz parçayı mikro servoya takmak için setteki daha büyük keskin vidalardan birini kullanın:
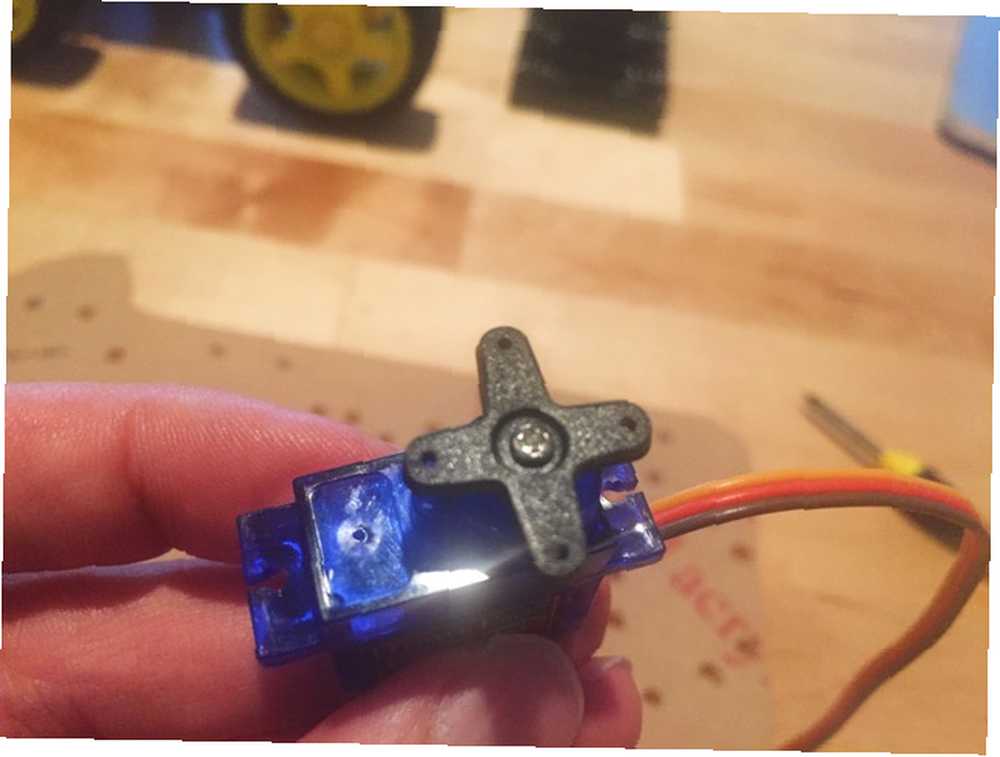
Ardından servoyu baş aşağı tutucunun siyah plastik halkasına çevirin. Servodan çıkan tellerin tutucunun daha uzun kısmıyla aynı yöne baktığından emin olun (tekrar, aşağıdaki resme bakın) ve traversi sabitlemek için dört küçük vida kullanın (tutucuda dört delik vardır. travers üzerindeki deliklerle hizalayın).

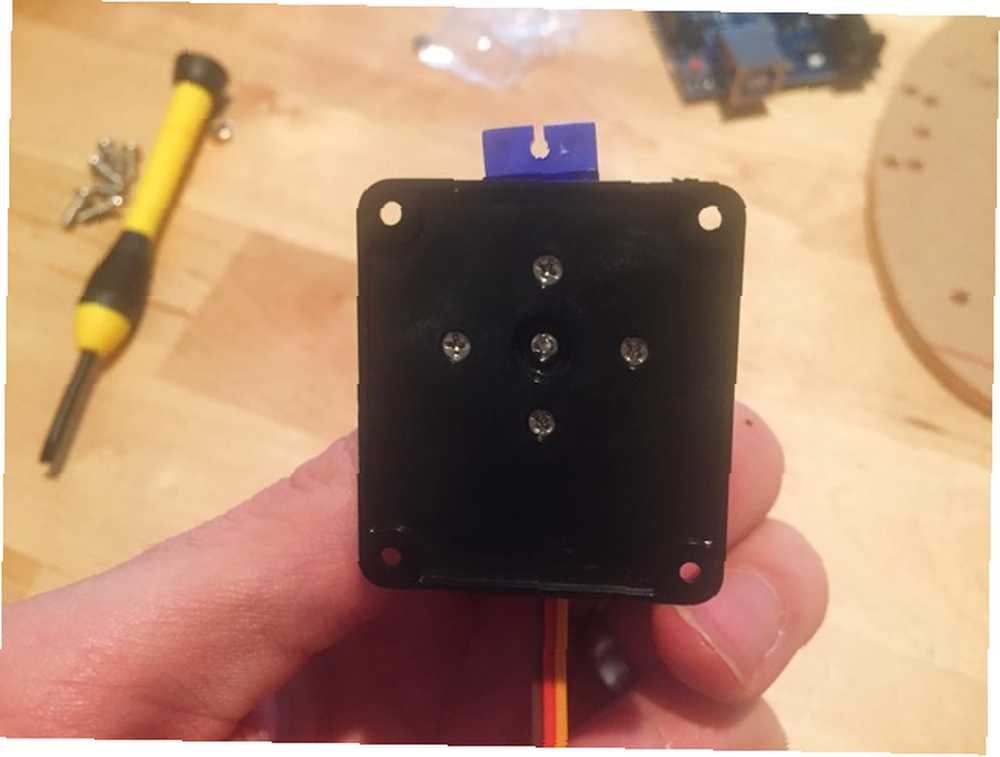
İşte taktıktan sonra nasıl göründüğü:
Son olarak, servo tutucunun diğer iki parçasını alın ve servo üzerine geçirin (yan parçalarda servodaki plastik tırnakla eşleşen yivler vardır).
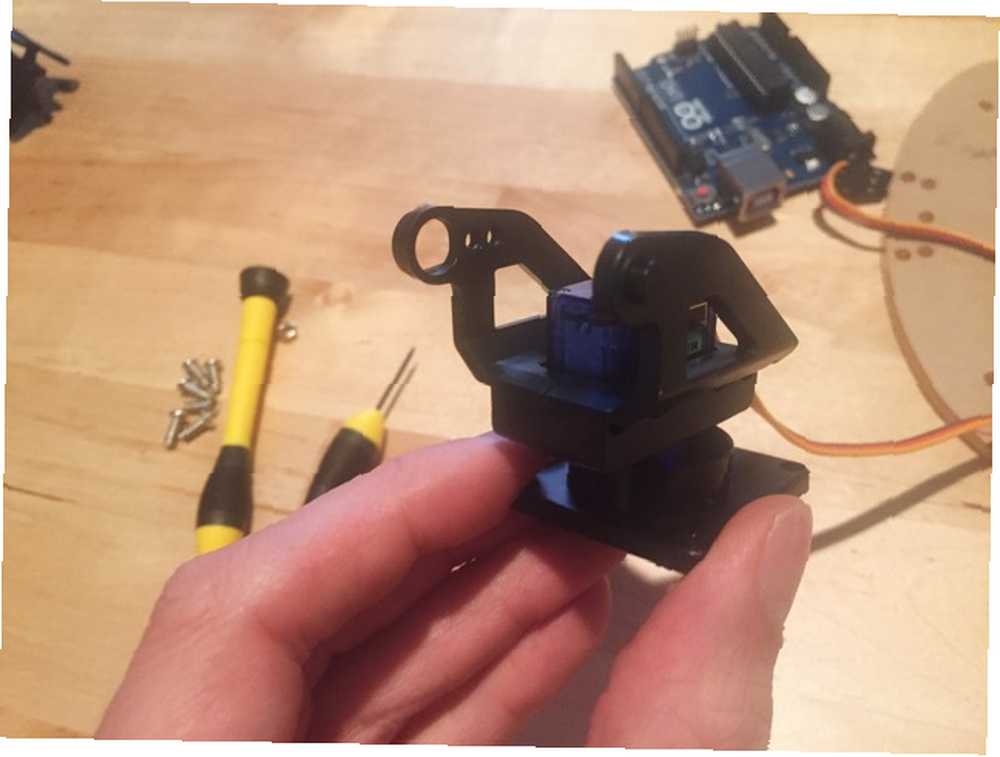
Şimdi servo tutucu tamamlandıktan sonra, kasaya monte edilebilir.
Cıvataların gittiği yer:
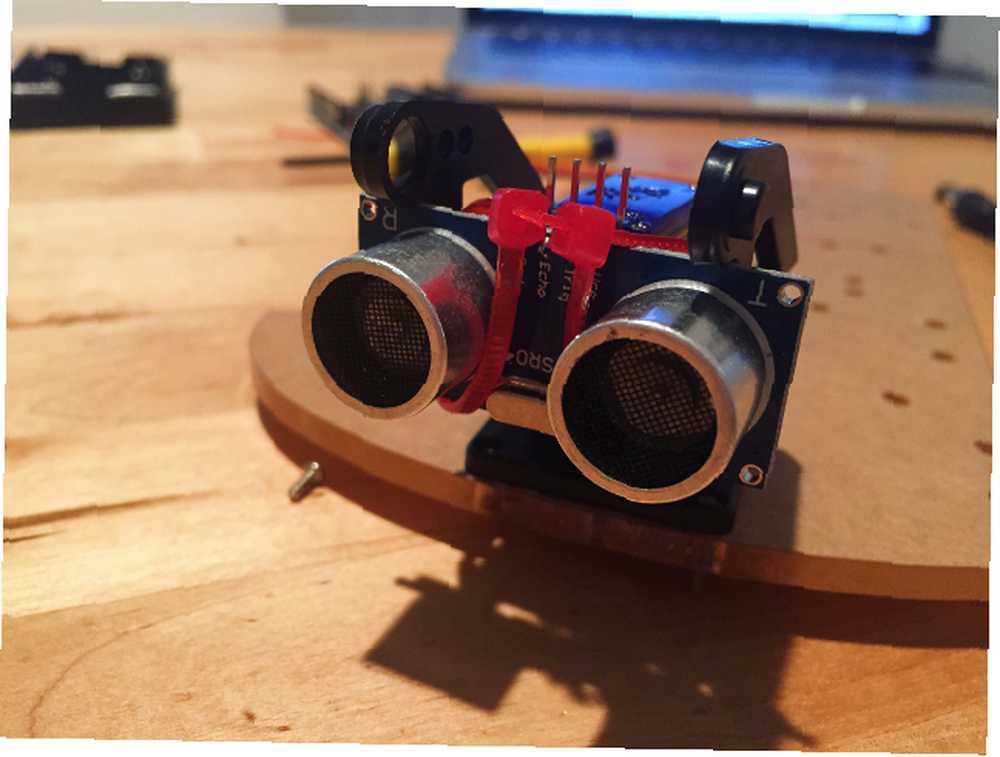
Robotumuza bir göz verme zamanı geldi. İki fermuar kullanarak ultrasonik sensörü servo tutucuya bağlayın.
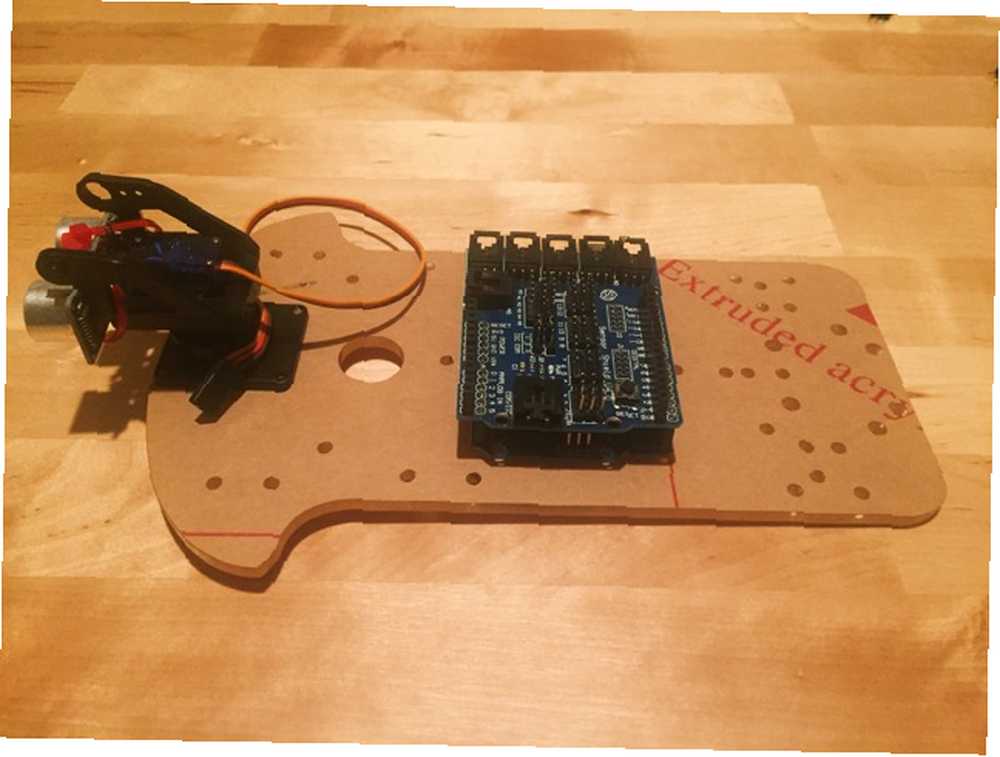
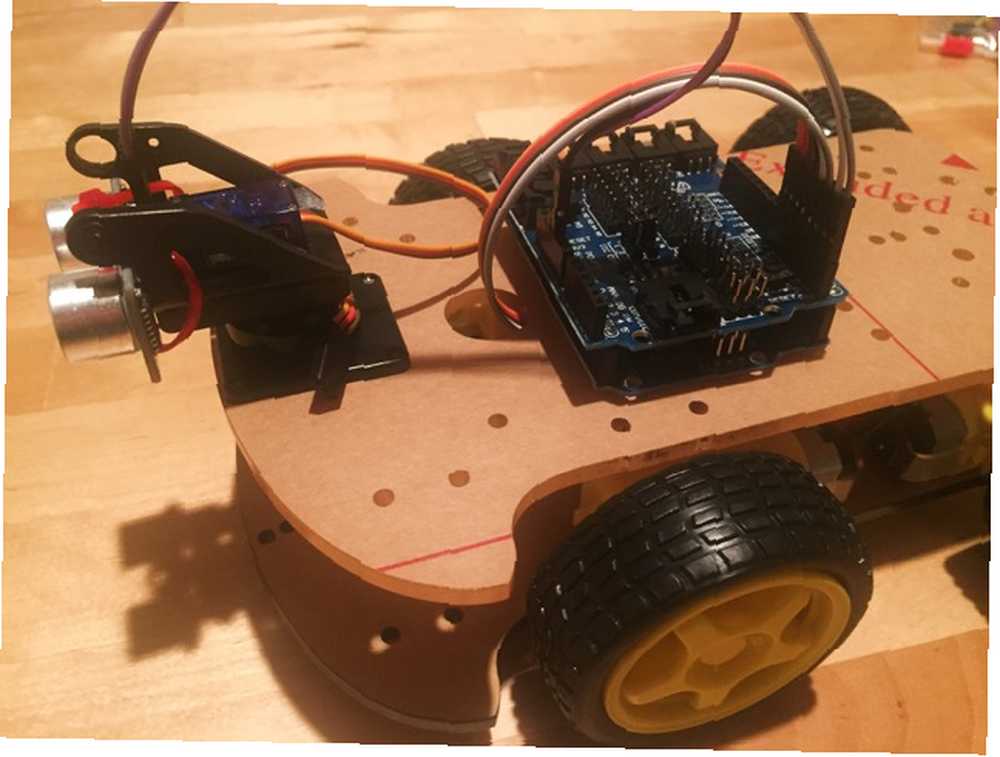
Benimle aynı kitten çalışıyorsanız, bir Arduino sensör kalkanı alacaksınız. Bu derlemede kullanmayacağız, ancak şimdi isterseniz UNO'nun üstüne açabilirsiniz (aşağıdaki resimde olduğu gibi). Ekranın altındaki pimleri Arduino'daki G / Ç bağlantı noktalarıyla hizalayın ve bağlamak için aşağı bastırın. Şu anda ihtiyacınız yok, ama kalkanlar kullanışlı olabilir Projelerinizi Güçlendirmek için En İyi 4 Arduino Kalkanı Projelerinizi Güçlendirmek için En İyi 4 Arduino Kalkanı Projelerinizi Güçlendirmek için En İyi 4 Arduino Kalkanı rehberlik eder, ancak şimdi tökezleyen bir bloğa çarptınız - elektronik rüyanızı gerçekleştirmek için daha fazla bit ve bob'a ihtiyacınız var. Neyse ki, eğer… .
Bir sensör kalkanı taksanız da kurmasanız da, ultrasonik sensörü Arduino'ya bağlamak için şimdi dört kabloya ihtiyacınız olacak. VCC, GND, TRIG ve ECHO üzerinde dört pim vardır. VCC'yi Arduino'daki 5V pinine, GND'den GND'ye ve TRIG ve ECHO'dan I / O pinlerine 12 ve 13 bağlayın.
Şimdi kasanın alt kısmını tutun ve altı köprü telini H köprüsünün G / Ç pinlerine bağlayın (ENA, IN1, IN2, IN3, IN4 ve ENB olarak işaretlenmişlerdir). Hangi renk kablolarının hangi bağlantı noktalarına bağlı olduğunu unutmayın; daha sonra bilmeniz gerekir..
Şimdi bu şeyi bir araya getirmeye başlamanın zamanı geldi. Kasanın üst kısmını tutun ve alt kısma bağlı bakır millerin üzerine yerleştirin ve H köprüsüne bağlı telleri kasanın ortasındaki delikten çekin. Altı kabloyu G / Ç bağlantı noktalarına aşağıdaki gibi bağlayın:
- ENA - G / Ç bağlantı noktası 11
- ENB - G / Ç portu 10
- A1 ila G / Ç portu 5
- A2 - G / Ç bağlantı noktası 6
- B1 - G / Ç bağlantı noktası 4
- B2 - G / Ç port 3
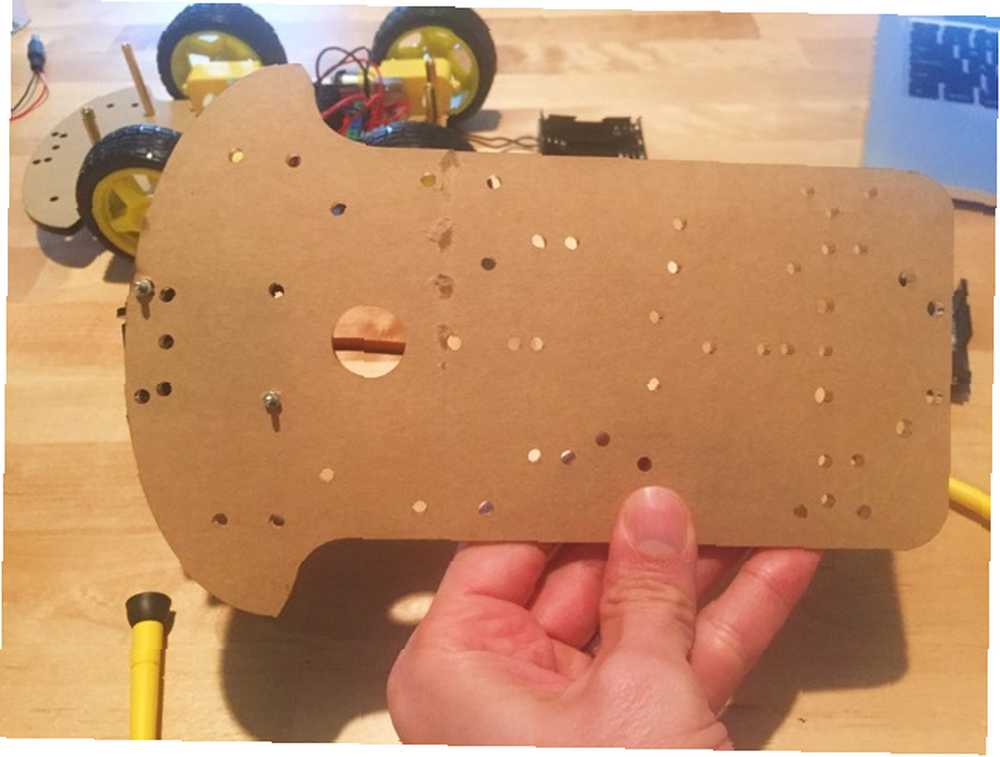
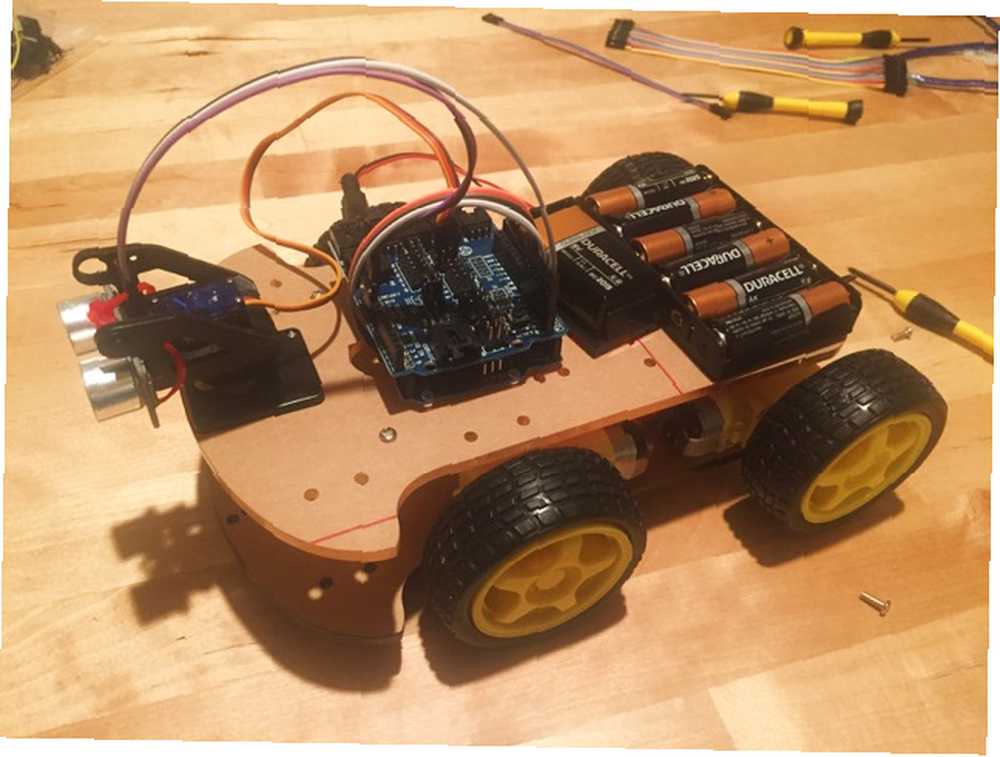
Şimdi, kasanın üst kısmını bakır millere bağlamak için dört kısa vida kullanın. Altı adet AA pil tutucusunu kasanın üzerine yerleştirin (mümkünse vidalayın), 9V hücre tutucusunu Arduino'ya takın ve bu bot sallanmaya hazır!
Neredeyse sallanmaya hazır. Henüz yeterince kişiliğe sahip değil.
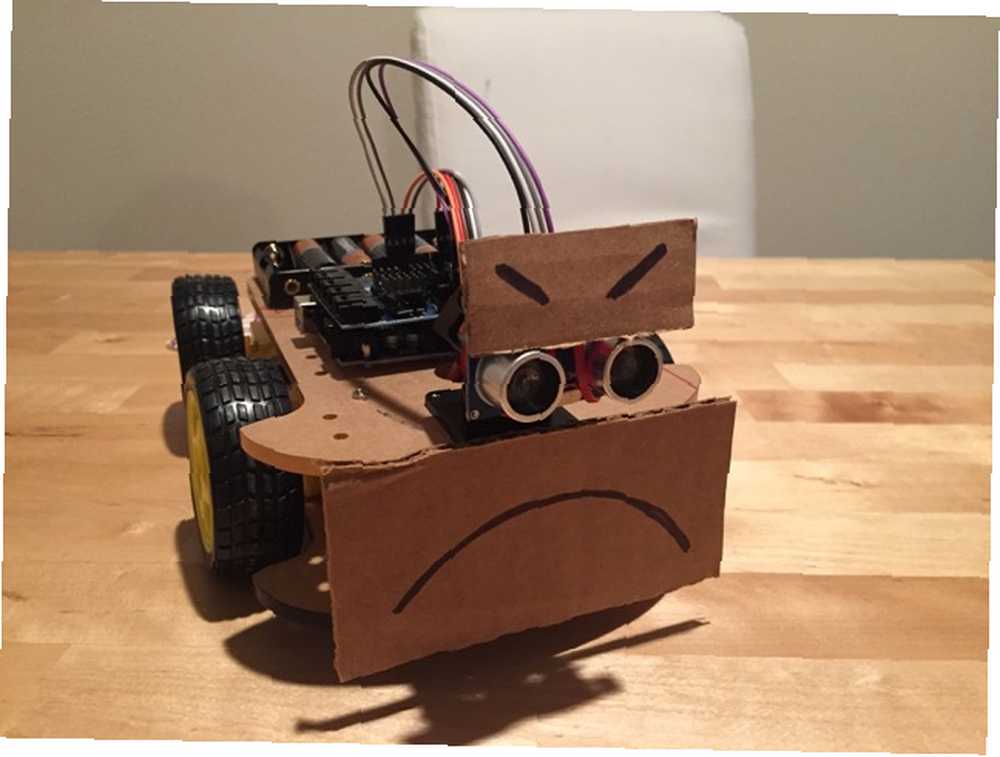
Oraya gidiyoruz. Şimdi bir beyin vermek için. Biraz programlama yapalım.
Yapacağımız ilk şey, köprü ve motorların doğru takıldığından emin olmak için yapılan testtir. İşte botun yarım saniye ileri sürmesini, yarım saniye geri sürmesini, ardından sola ve sağa dönmesini söyleyen hızlı bir çizim:
Basit bir test için çok fazla kod var, ancak tüm bu fonksiyonları tanımlamak daha sonra ince ayar yapmayı kolaylaştırıyor. (Bu işlevleri tanımlamak için H köprüsünü kullandığı blog yazısı için Billwaa'ya teşekkür ederiz.) Bir şeyler ters giderse, tüm bağlantılarınızı ve tellerin doğru pinlere bağlandığını kontrol edin. Her şey işe yaradıysa, sensör testine geçme zamanı gelmiştir. Ultrasonik sensörü kullanmak için, NewPing kitaplığını indirmek ve sonra kullanmak isteyeceksiniz. Eskiz> Kütüphane Ekle> .ZIP Kütüphanesi Ekle… kütüphaneyi yüklemek için.
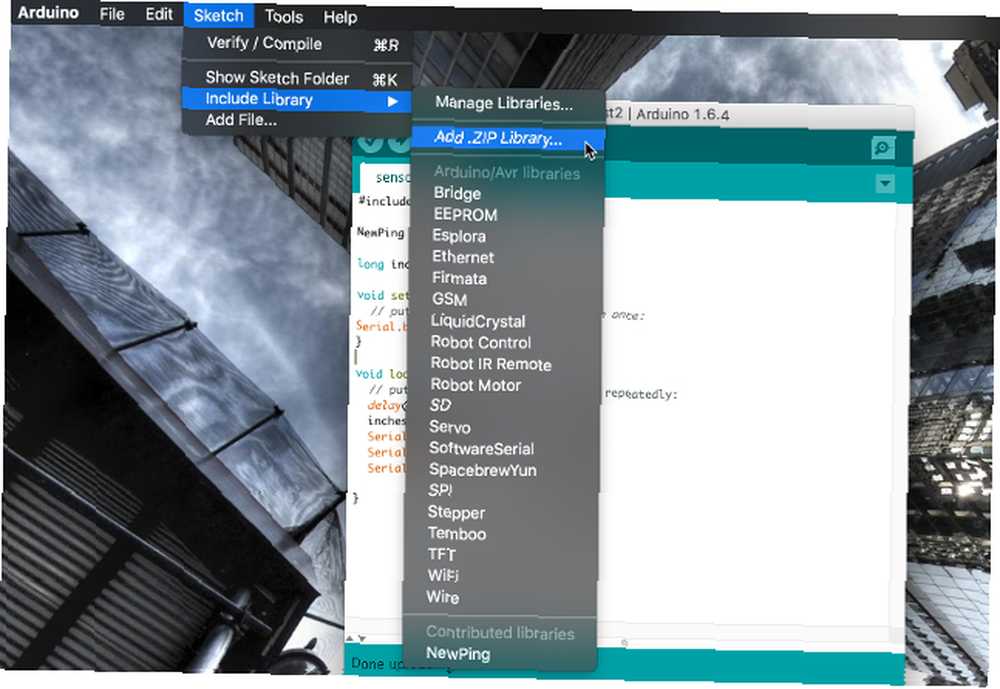
Skeçin tepesinde include ifadesini gördüğünüzden emin olun; eğer yapmazsan, vur Eskiz> Kütüphaneye Dahil Et> NewPing. Bunu yaptıktan sonra, aşağıdaki çizimi yükleyin:
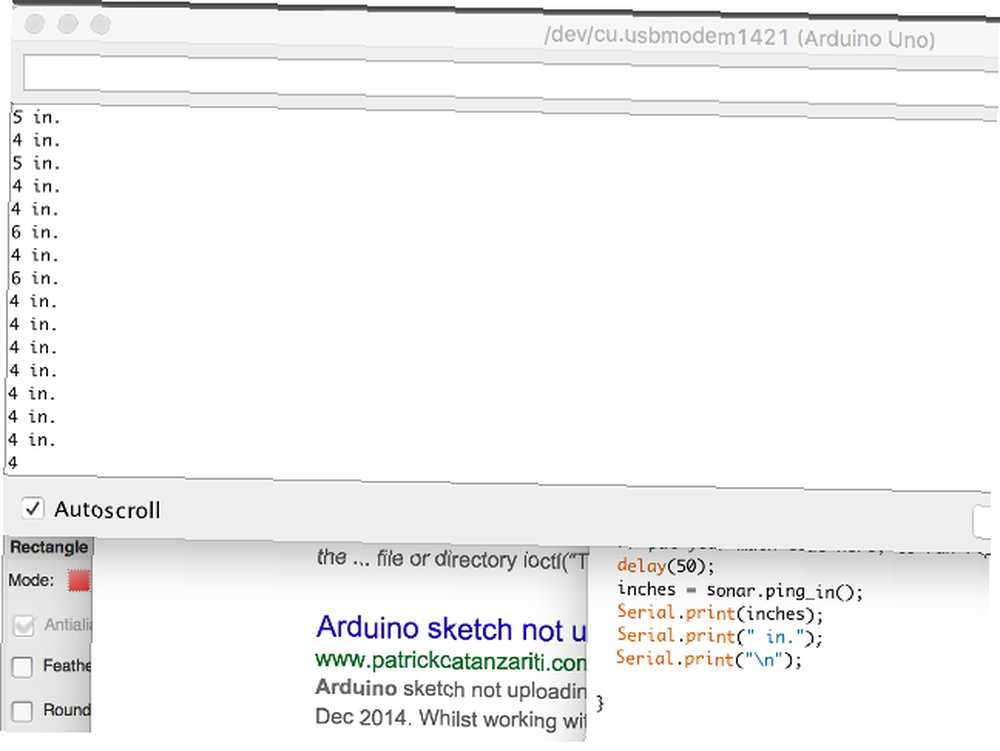
Krokiyi yükleyin ve kullanarak seri monitörü açın. Araçlar> Seri Monitör. Hızla güncellenen bir sayı dizisi görmelisiniz. Elinizi sensörün önünde tutun ve bu numaranın değişip değişmediğine bakın. Elinizi içeri ve dışarı doğru hareket ettirdiğinizde, elinizin sensörden ne kadar uzakta olduğuna dair bir ölçüm yapmanız gerekir..
Her şey doğru çalıştıysa, hepsini bir araya getirme ve bu şeyin çalışmasına izin vermenin zamanı geldi! İşte robotun kodu şimdi. Muhtemelen söyleyebileceğiniz gibi, bu temelde robotun davranışını kontrol etmek için bir if if ifadesiyle bir araya getirilen iki test resmidir. Çok basit bir engellerden kaçınma davranışı verdik: eğer dört santimden daha az bir şey tespit ederse, yedekleme yapacak, sola dönecek ve tekrar hareket etmeye başlayacaktır. İşte botun eylem videosu.
Robotuna Hayat Ver
Bu davranışı doğru şekilde yaptıktan sonra, daha karmaşık davranışlar ekleyebilirsiniz; robotu sola ve sağa çevirme arasında değişebilir hale getirin veya rastgele seçin; Bir şeye yaklaşırsa sesli uyarı verir; yedekleme yerine sadece dönün; gerçekten sadece hayal gücünle sınırlısın. Arduino başlangıç kitinizde her şeyi kullanabilirsiniz Arduino Başlangıç Kitinizde neler var? [Arduino Yeni Başlayanlar] Arduino Başlangıç Kitinizde Neler Var? [Arduino Yeni Başlayanlar] Elektronik bileşenlerle dolu bir kutu ile karşı karşıya kaldıklarında bunalmış olmak kolaydır. Kitinizde tam olarak ne bulacağınıza dair bir kılavuz. daha fazla işlev eklemek için. Ayrıca servo için henüz bir şey kodlamadığımızı fark edeceksiniz: robotunuzu gerçekten yapabilirsiniz “gözleri” ileri geri hareket et. Belki de onları doğrudan önündeki bir engel bulduğunda yedekleme yapmak yerine bir yol aramak için kullanıyor olabilirsiniz..
Bu robotu veya başka bir robotu inşa etmeye karar verirseniz bize bildirin ve davranışını veya görünüşünü nasıl kişiselleştirmeye karar verdiğinizi bize bildirin.. Bu robotla ilgili herhangi bir sorunuz varsa, bunları aşağıdaki yorumlara gönderin; size yardımcı olup olamayacağımı göreceğim.!